
PI’s: Jaydev Desai & Shreyes Melkote
Funded by: Imlay Foundation
Minimally invasive surgeries have posed two unique challenges: visualization and instrumentation. The problem of visualization has been largely solved with the development of high definition cameras and fibro-optic light sources (endoscopic surgery). The second problem of developing instruments that can match the manual dexterity of a surgeon yet fitting into a narrow corridor has proven to be more challenging. The lack of suitable instruments limits the complexity of treatable diseases with endoscopic surgery, and it is this latter problem that we wish to tackle. Lack of appropriate instrumentation to facilitate fine dexterous manipulation in pediatric neurosurgery is a grand challenge!
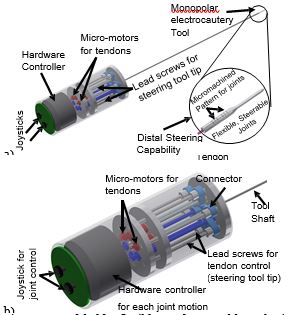
Endoscopic surgery is technically challenging for surgeons because it violates some fundamental, time-proven principles of surgery. There are two specific challenges: A) whenever possible, surgeons will bring tissues out of the body cavity (think of bringing intestines out of the abdominal cavity) or create a flattened surgical field; this maneuver minimizes shadows created by lighting, prevents instruments and hands from blocking the line of vision, and enables simultaneous manipulation from multiple directions by surgeons and assistants. In endoscopic surgery, restrictions are placed upon the angle of attack due to the absolute coupling of the line of vision and the surgical instrument, which often results in undesirable consequences; B) Another maxim of efficient surgery states that one should minimize the amount of time spent in switching instruments. The time spent passing instruments back and forth between the surgeon and surgical assistant is time spent away from the patient. This problem is accentuated in endoscopic surgery because the extra step it takes to bring the surgical instrument into the surgical field. In this proposal, we will address the first challenge, namely providing the surgeon with the capability to do efficient manipulation in a confined workspace using a flexible and steerable robotic monopolar electrocautery tool with a joystick interface.
Chitalia, Y., Jeong, S., Bok, J., Nguyen, V., Melkote, S., Chern, J., Desai, J., “Towards the Design and Development of a Pediatric Neuroendoscope Tool”, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019, pp. 2998-3004